|
|
|
|
Продолжение серии MiR -> MiR4
|
|
Лето 2005. Закончилась разработка следующего варианта педалей. С осени 2004, по лето 2005 работы были заброшены, в связи с участием в разработке и коренной модификации ( и изучении программирования ) генератора на "Нулевом сервере". Теперь я вернулся к железкам и представляю Вашему вниманию следующее творение моих рук и головы.
|
|
| Это последний из тестовых вариантов, который меня наконец-то полностью устроил. Почему я публикую не после окончания всех работ? Из чисто меркантильных целей - возможно будут советы или замечания, которые помогут улучшить конструкцию. |
Для начала опишу свою концепцию, которая была воплощена в железо: |
|
| Что-то вроде автомата Калашникова :) |
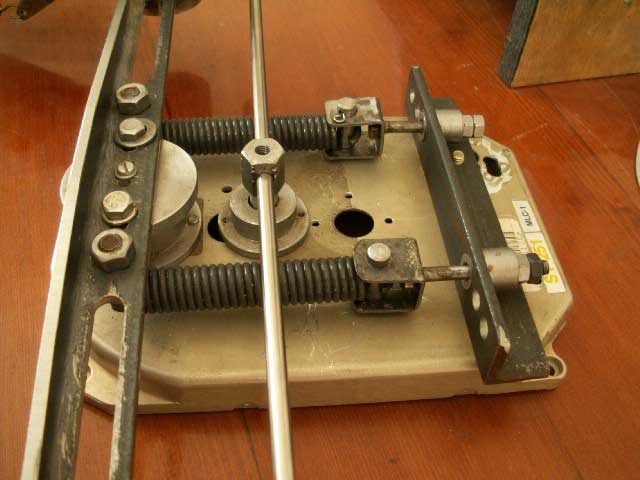
Для сокращения сложных узлов, я сделал переднее коромысло "основным". Оно берет на себя практически все нагрузки, которые возможны при эксплуатации. 6 подшипников (три пары) обеспечивают отсутствие люфтов и мягкость хода.
Для самого коромысла использован стальной уголок 25х25, сточенный для красоты и уменьшения веса (в проекте был дюралевый профиль прямоугольного сечения). К нему приварены, с применением кондуктора, стаканы для подшипников. На заднее коромысло действуют только силы V, направленные вдоль оси коромысла, и гораздо меньшие, чем силы приложенные к переднему, поэтому применил подшипники скольжения ( металл-фторопласт или металл-металл) и пруток диаметром 6 мм. Незнаю, выдержат ли они без деформаций прыжки взрослого человека, но в отличии от ребенка, надеюсь взрослый не станет этого делать. Если же очень захочется - сначало попрыгает пусть на своем джойстике :) Задачи выдержать все немыслимые нагрузки у меня не было, поэтому получилось достаточно компактно, нетяжело и несложно.
Педали сделаны 3х осевыми. Она ось на руль направления и две независимые оси на площадках ( тормоз). Угол площадок регулируется ступенями по 15 град. Трех ступеней оказалось достаточно для любого положения пилота. Амплитуда наклона площадки устанавливается при изготовлении формой ограничителя хода.
Оригинально сделана система пружин. Обычно, обе пружины устанавливаются с натягом ( первые педали -"БЗП" и большинство других), так, чтоб в крайних положениях коромысла, они оказывались в свободном положении, или почти в свободном. Из-за взаимной компенсации пружин, центр у педалей оказывается "размытым". Второй вариант - как у "Симпед", в моих ранних разработках , и в педалях от UIV (ВКБ). Он отличается очень четким центром, который в джойстиках мешает, а в педалях помогает. Я объединил эти варианты и создал новый. В нем соединены простота первого и четкость второго.
Регулировочными гайками выставляем центр и убираем люфт, по вкусу можно смягчить центр, слегка натянув пружины. При прямом ходе пружина растягивается как обычно, но работает только ОДНА, так как обратном ходе, вторая в свободном состоянии, смещается по направляющей назад. Решение простое, но сколько мозгов оно мне стоило! Зато теперь работает так, как я и хотел.
Регулировать жесткость хода, можно переставляя крепление пружин на переднем коромысле. Для этого там сверлятся несколько отверстий. Это я не стал делать, так как данное растояние от центра вращения коромысла, для меня оказалось достаточно оптимальным. |
| Площадка-основание не проектировалась и не делалась, так как педали крепятся с помощью профиля к креслу. В дальнейшем, к этому же профилю будет крепится и РУС ( работы над ним тож ведутся) |
| После окончательных доводок и уточнений, некоторые узлы будут переделаны с лучшим качеством и/или из другого материала, остальные покрашены. В зеленый :) или серый цвет. |
(c)boRada
07.07.2005
|